< Previous | Contents | Next >
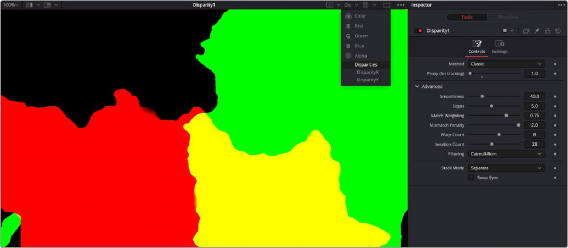
Disparity is the difference between the left and right image. The Disparity map is used by nodes to align and massage the stereo pair of images.
The Disparity node analyzes a stereo pair of images and generates an X&Y disparity map.

TIP: When connectng stereo pairs in the node tree, make sure that the left and right images are connected to the left and right inputs of the Disparity node.
TIP: When connectng stereo pairs in the node tree, make sure that the left and right images are connected to the left and right inputs of the Disparity node.
TIP: When connectng stereo pairs in the node tree, make sure that the left and right images are connected to the left and right inputs of the Disparity node.
The workflow is to load a left and right stereo image pair and process those in the Disparity node. Once the Disparity map is generated, other nodes can process the images.
![]()
Disparity generation, like Optical Flow, is computationally expensive, so the general idea is that you can pre-generate these channels, either overnight or on a render farm, and save them into an EXR sequence.
The toolset is designed around this philosophy.
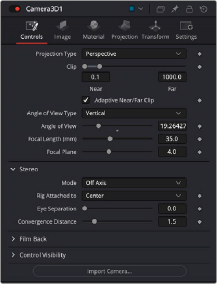
Stereo Camera
There are two ways to set up a stereoscopic camera. The common way is to simply add a Camera 3D and adjust the eye separation and convergence distance parameters.
The other way is to connect another camera to the RightStereoCamera input port of the Camera 3D. When viewing the scene through the original camera or rendering, the connected camera is used for creating the right-eye content.